Founded in 1933 by Charles Stark Draper, our company Draper initially focused on the development of precision instruments for the military and aerospace industries. Over the decades, we have diversified our portfolio into industries such as biotechnology, human systems, cyber solutions and autonomous systems. Leveraging our expertise in advanced engineering and research, we continue to push the boundaries of what is possible in all fields from space exploration to medical diagnostics.
Celebrating Draper’s 50th Anniversary
In 2023, we celebrated a significant milestone, commemorating 50 years as an independent nonprofit organization and 90 years as an innovative engineering organization. Throughout these decades, our legacy has been defined by unwavering dedication to advancing our nation's interests, well-being, and security.
From designing world-class technologies that facilitated the Apollo Moon landings, to pioneering first-of-a-kind technologies that range from inertial navigation, integrated circuit processors, software, digital controls, microelectromechanical systems, and microfluidics, we take immense pride in the impactful work we have accomplished in 50 years.
Looking ahead, we are eager to further cultivate our legacy, safeguard democracy, defend our nation, and contribute to the improvement of humanity.

Historic Timeline
Use Shift + Arrow-Right / Arrow-Left to switch between the side navigation and timeline














1933
Charles Stark Draper, Research Associate at MIT, spearheaded initiatives at the Aeronautical Instrumentation Laboratory, making contributions in the field for the MIT President’s Report for 1933–34.
1940
Charles Draper’s notable work regarding fire control led to his first experiments in inertial navigation. These were detailed in a 1940 MIT doctoral thesis by Walter Wrigley, one of Draper’s students.
1942
The Lab accomplished a great feat with the Mark 14 Gunsight, which was used by anti-aircraft gunners aboard the USS North Carolina during the battle of Stewart Island. This was one of the first of Charles Draper's designs that used the “disturbed-line-of-sight” principle.
1944
The Laboratory began work on the A-1 aircraft gun-bomb rocket sight. It became the A-4 gunsight used in the Korean War on F-86 Day Fighters.
1947

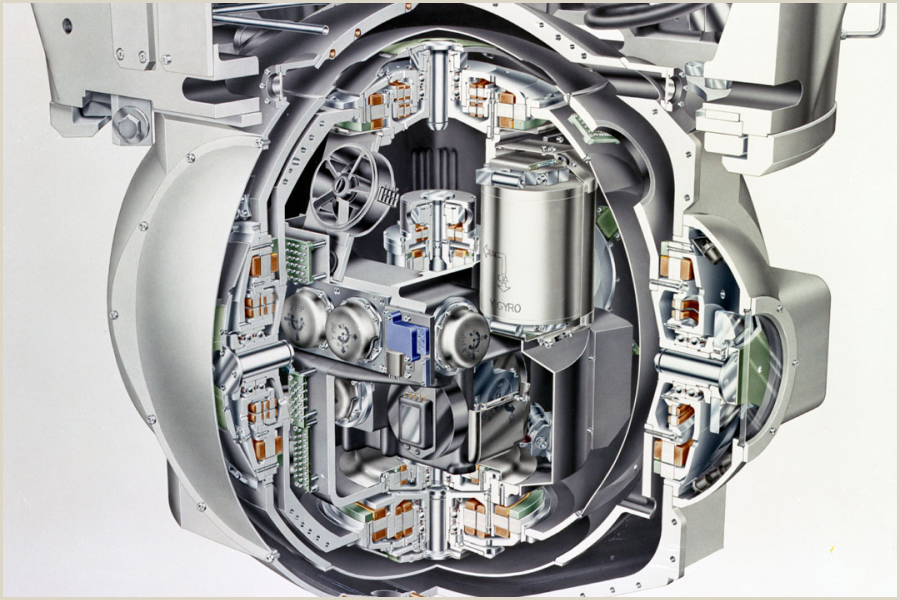
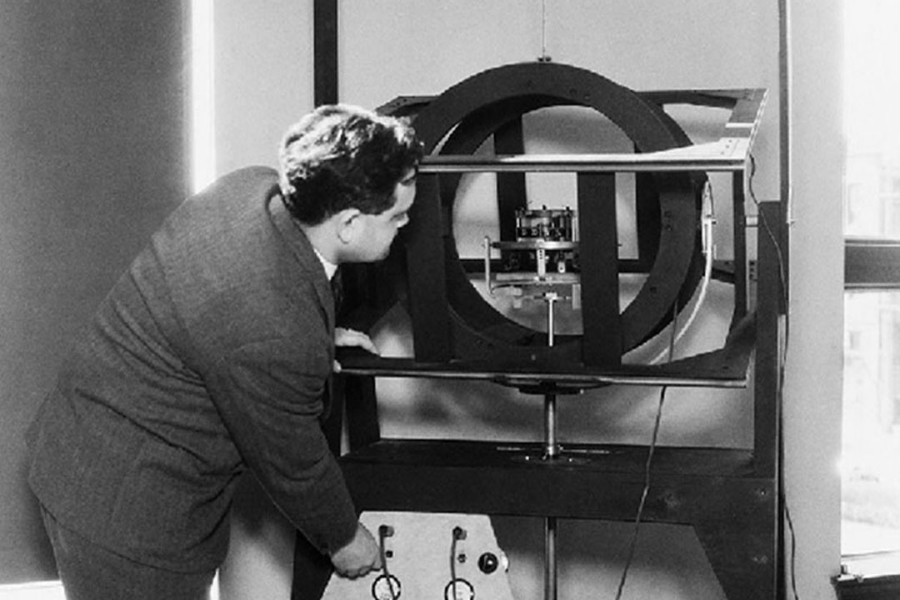
The Instrumentation Laboratory created the single-degree-of-freedom, rate integrating, floated gyroscope. This enabled a stabilized platform and contributed to the start of high-performance gyros for ballistic missile guidance, Apollo, SINS, and satellites.
1949
The Instrumentation Laboratory demonstrated the first celestial-aided inertial navigation system, FEBE, in an Air Force B-29 aircraft. FEBE was a predecessor to SPIRE and used stars as reference points to improve navigational accuracy.
1953
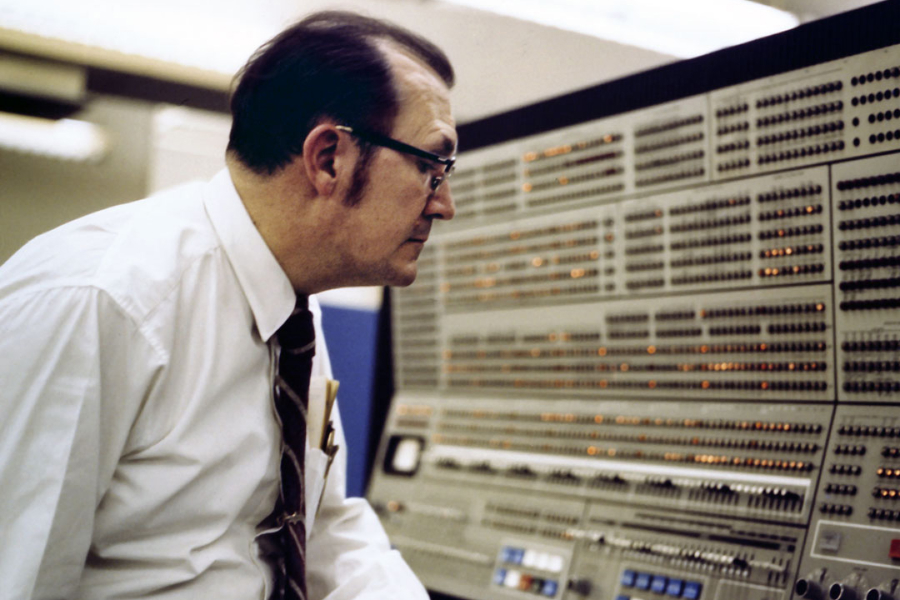
The first compiler program written to translate mathematical notation into a usable program for a computer was created by Dr. Hal Laning. This effort started in 1952 and he achieved an operational program in 1953.
The first working implementation of "inertial navigation" for a cross-country trip was completed with Space Inertial Reference Equipment (SPIRE). SPIRE guided the first coast-to-coast airplane flight without the use of a pilot.
1954

The Marine Stable Element (MAST) system, a gyroscopic compass, and a stable vertical unit combined into one instrument were tested at sea. Later, some of MAST’s technology would be integrated into the SINS and missile guidance system designs.
The Lab developed an inertial guidance mechanization, including a new guidance theory and various equations. The inertial guidance mechanization offered a superior system to control ballistic missiles autonomously without broadcasting their positions. It was first used in the Thor Intermediate Range Ballistic Missile.
1955
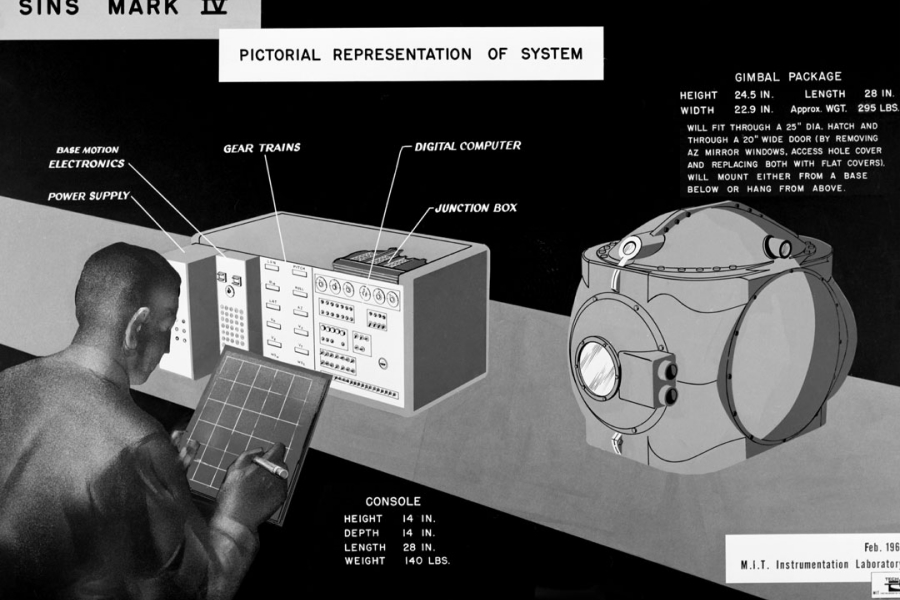
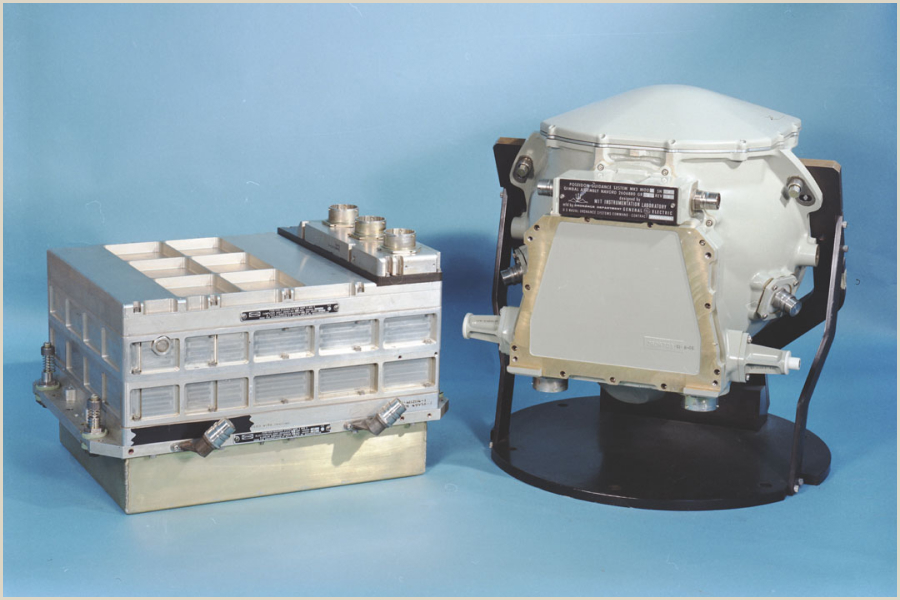
The Instrumentation Laboratory delivered an experimental SINS to the Bureau of Ships. SINS was intended for submarines that would carry Polaris missiles.
1957
The U.S. Navy initiated a contract to design, model, test, and document an all-inertial guidance system for the Polaris missile. This initiated the long relationship between Draper Laboratory and the Navy Strategic Programs Office.
The first successful test flight of a U.S. Air Force Thor intermediate-range ballistic missile with all-inertial guidance was held later that year. The event was sped up due to the Soviet launch of the Sputnik satellite.
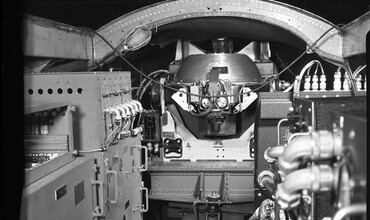
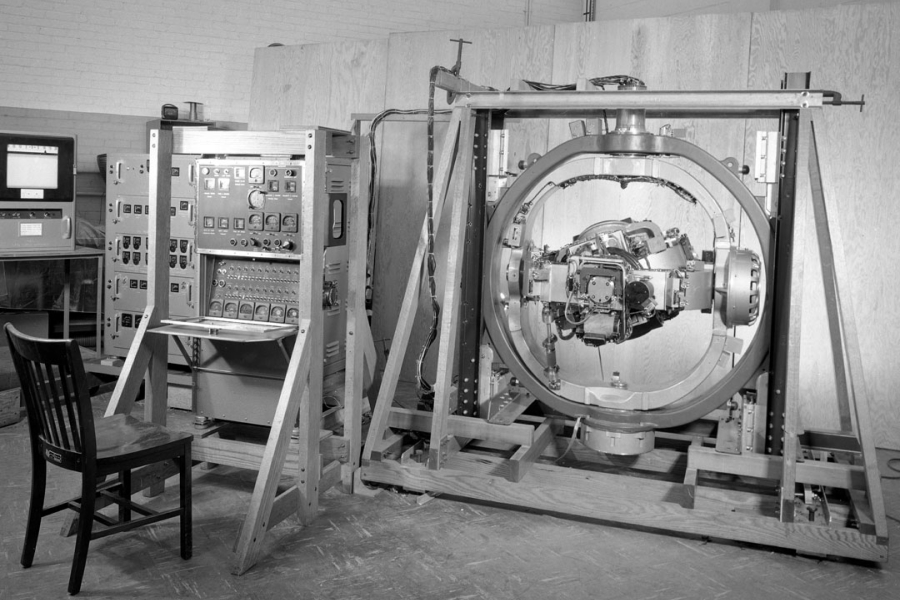
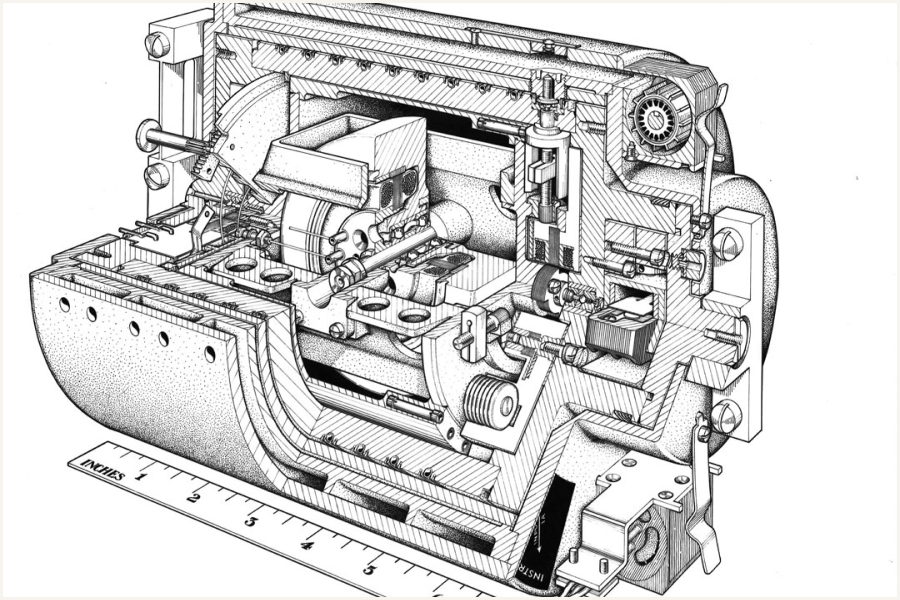
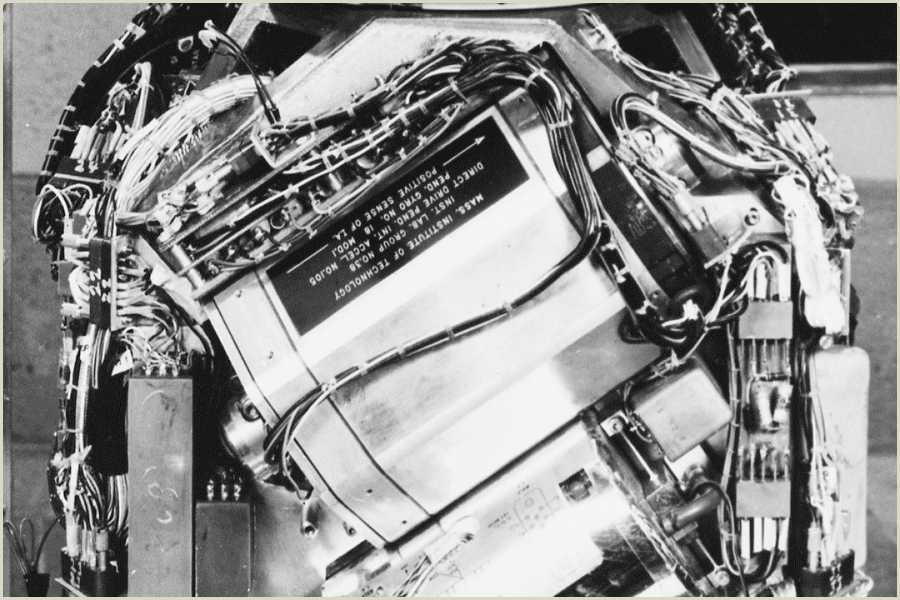
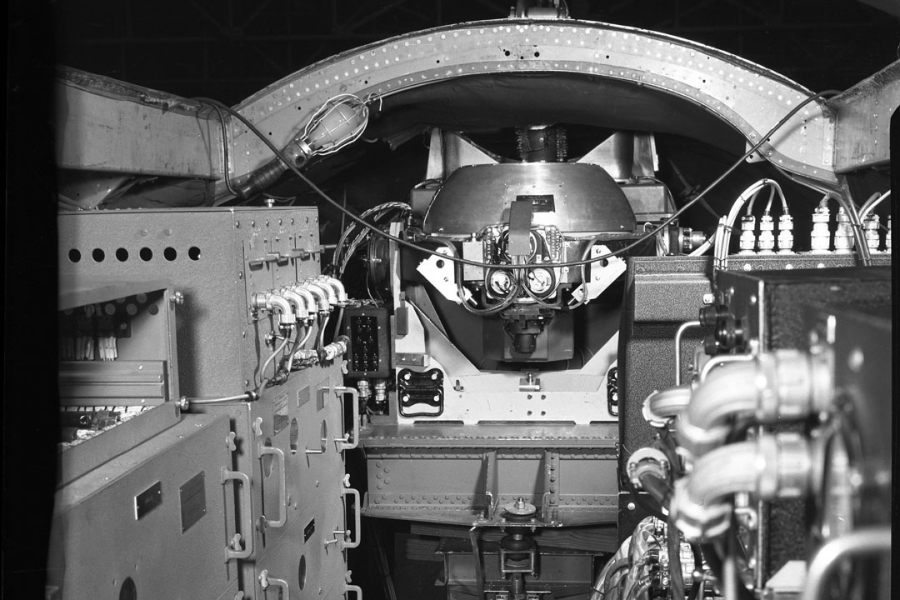
Since the Instrumentation Lab provided inertial guidance design and consulting support to the industry, development began of the Floated Inertial Measurement Ball (FLIMBAL). FLIMBAL would place the inertial instruments and the associated electronics of a self-contained environment inside a floated sphere.
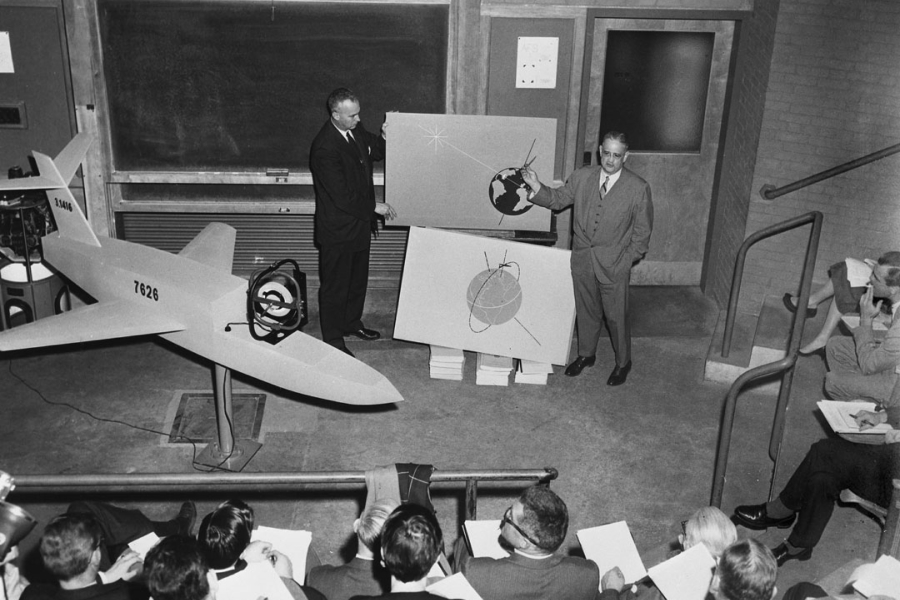
MIT IL was given a contract to develop the guidance and on-orbit control system for the WS-117L satellite vehicle based on the MIT IL SINS. That program led to the first U.S. reconnaissance program and the Corona spacecraft.
1959
The Mars probe concept, developed by the Instrumentation Lab, led to a NASA contract. The breadboard model, which was developed later, became the base for the Apollo computer’s architecture and function, including navigation and control.
1960
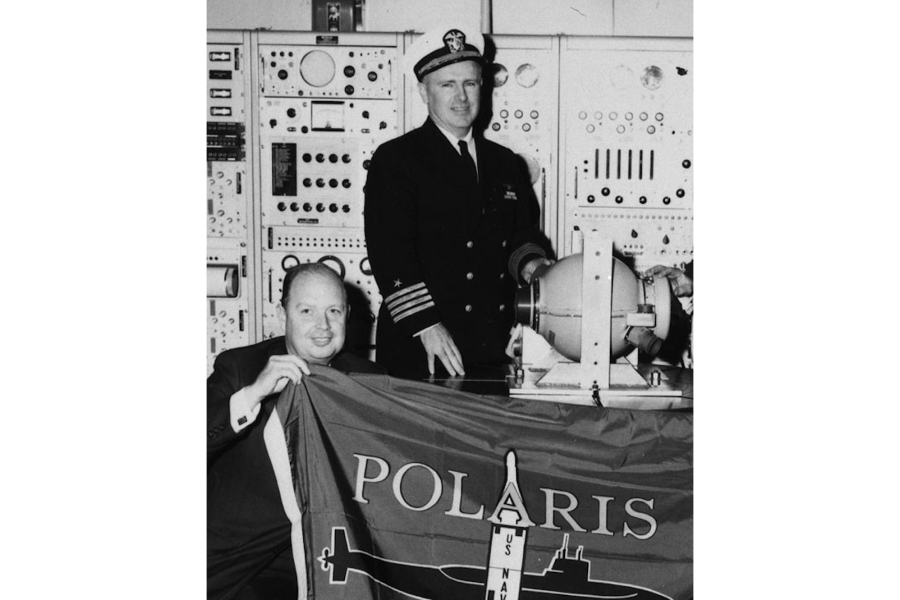
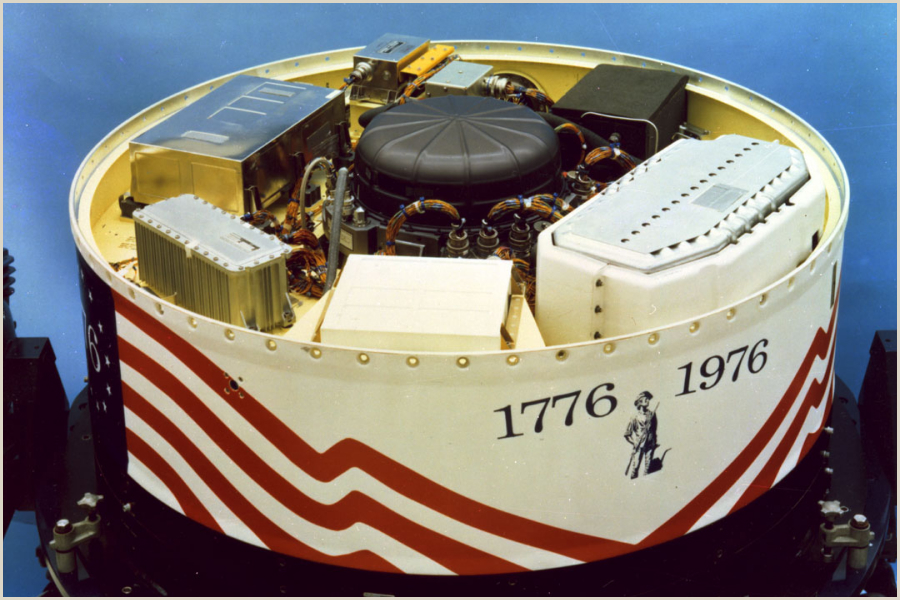
The successful launch of a Polaris A1 missile occurred from a submerged submarine, equipped with the MK1 guidance system. This was designed by the Instrumentation Lab and had a range of 1,200 nautical miles.
1961
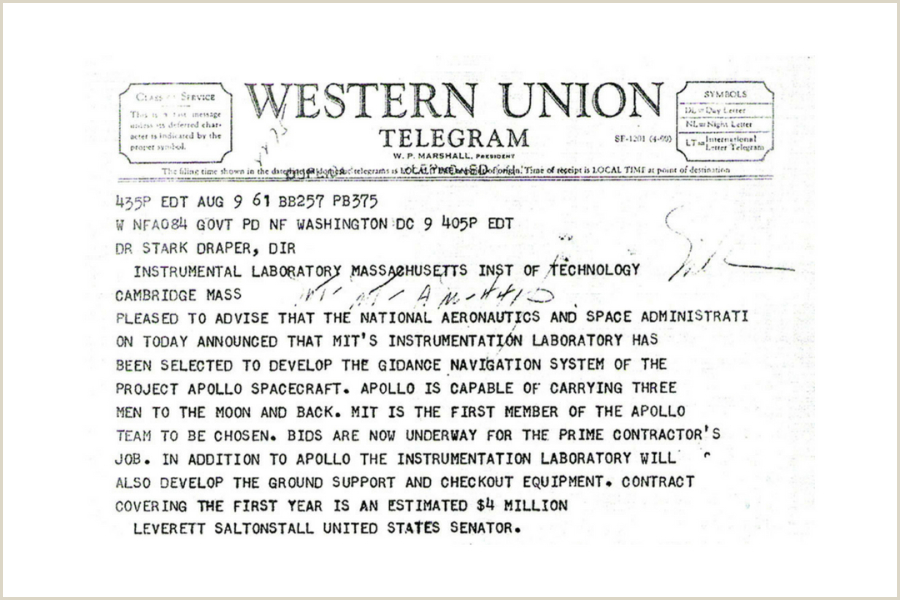
Draper received the first major contract awarded by NASA for the Apollo project, which was for the guidance, navigation, and control system. President John F. Kennedy agrees to land a man on the moon by the decade's end.
The U.S. Air Force Titan II missile was demonstrated successfully. Its inertial system was based on a prototype from an Instrumentation Lab design. MIT’s guidance system for Titan was a development of Thor’s IRBM system.
1962
Initial research at the Instrumentation Laboratory regarding strap-down navigation systems was recorded in a student's ScD thesis: Theoretical Analysis of Gimballess Inertial Equipment Using Delta-Modulated Instruments by Thomas Wiener.
The Instrumentation Laboratory developed the guidance system for the Polaris A2 Fleet Ballistic Missile. Its successful launch allowed the missile to reach a target 1,500 nautical miles away from the launch point.
1963

The first flight of the U.S. Air Force Minuteman II missile took place with an NS-17 guidance system containing a Pendulous Integrating Gyroscope Accelerometer (PIGA) designed by the Instrumentation Laboratory.
1964
The Polaris A3 fleet ballistic missile was deployed aboard USS Daniel Webster (SSBN 626) with the Instrumentation Laboratory-designed MK2 guidance system. The missile’s range was 2,500 nautical miles.
Submarine Inertial Navigation System (SINS) MK IV MOD 2 was tested at sea. It was equipped with improved technology from the prototype SINS, since undergoing development starting in 1960.
1968
The successor to Polaris for the U.S. Navy, The Poseidon (C3) fleet ballistic missile, was first flight tested with a Lab-developed MK3 guidance system.
Using a guidance and control system designed by the Laboratory, the Apollo 8 crew orbited the moon in a craft.
1969
Apollo 11 made the historic first manned moon landing using the onboard computer guidance, navigation, and control systems designed by the Instrumentation Lab. This was used for both the Command Module and the Lunar Module.
1970

Charles Draper was asked to provide designs for the Space Shuttle avionics system. A contract was received in 1971 from NASA. Over time, Draper’s role expanded into full responsibility for the design of the Space Shuttle’s on-orbit flight control system and its backup flight control software.
The Apollo 13 crew was rescued after an onboard explosion. We developed contingency autopilot software for the Lunar Excursion Module (LEM) computer. This allowed for stable control of the combined LEM and Command and Service Module during the trajectory correct maneuver to return to Earth.
The Apollo 13 crew was rescued after an onboard explosion. We developed contingency autopilot software for the Lunar Excursion Module (LEM) computer. This allowed for stable control of the combined LEM and Command and Service Module during the trajectory correct maneuver to return to Earth.
The Instrumentation Lab was renamed The Charles Stark Draper Laboratory, which served as a division of MIT. MIT President Howard Johnson announced a plan to divest Draper Laboratory.
The Integrated Control and Display system was delivered to the U.S. Navy from the Laboratory. It was used for the first of two Deep Submergence Rescue Vehicles (DSRVs) that launched that year.
1971

The USS James Madison deployed the Poseidon C3 ballistic missile, utilizing the MK3 guidance system.
The Special Projects Office (SP) of the U.S. Navy trusted our team with design and development duties for the guidance system for the Trident I missile. This design incorporated a star-tracker system aimed at improving accuracy.
1972
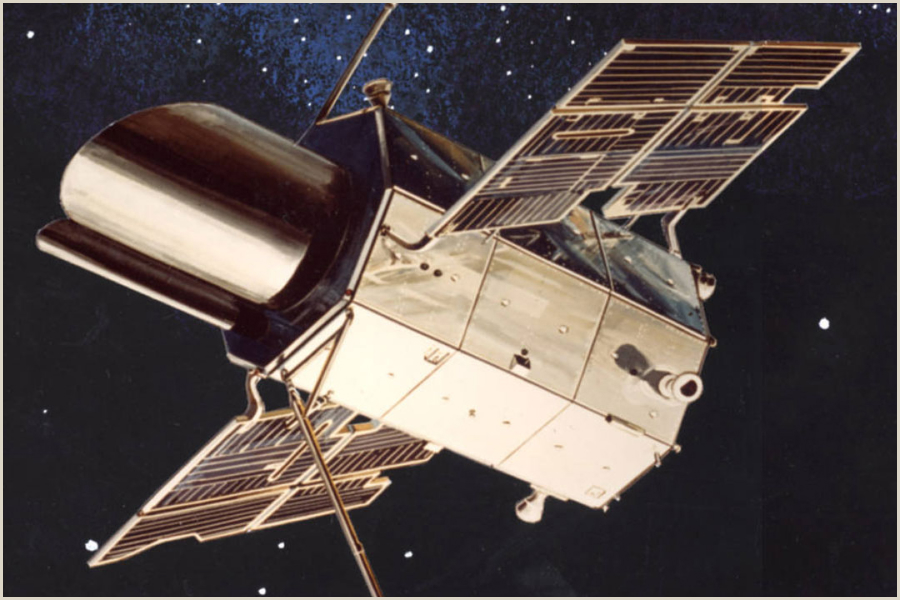
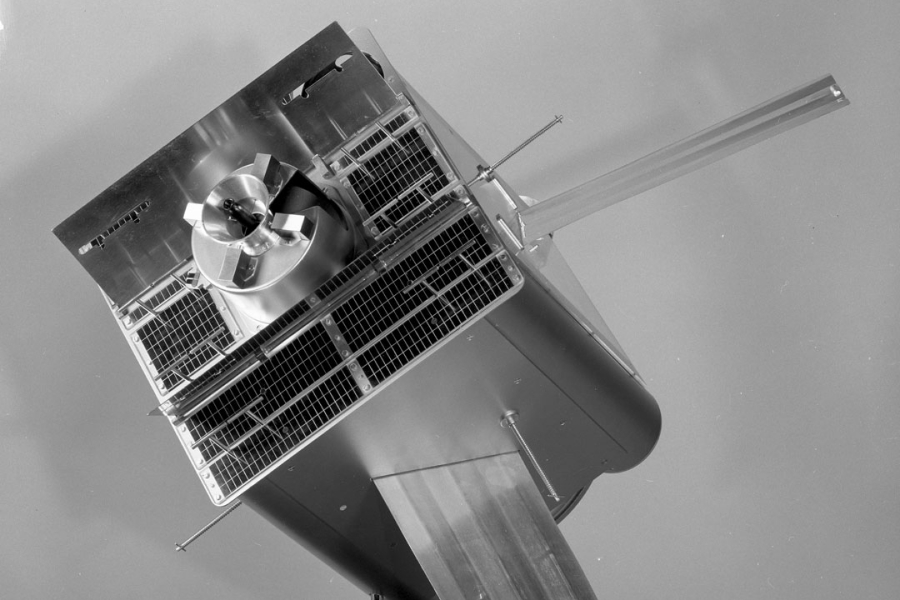
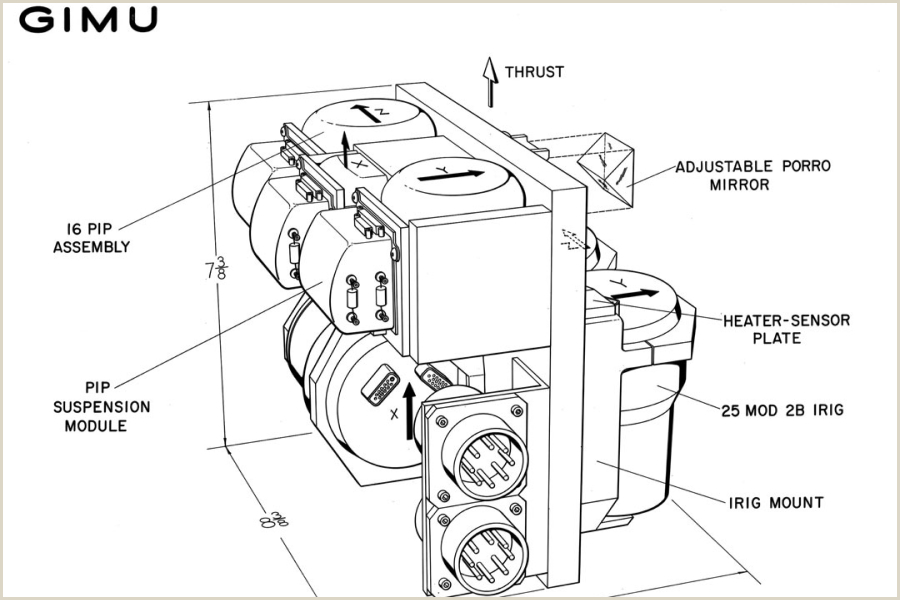
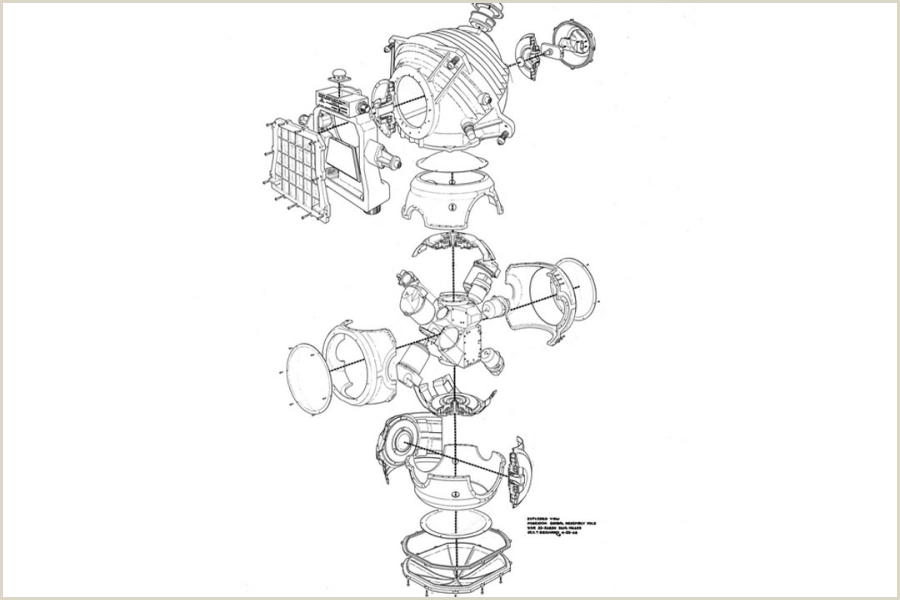
The third satellite from NASA’s Orbiting Astronomical Observatory went into orbit. It was the first to feature a Draper-designed inertial reference unit containing three floated beryllium gyros (2FBGs).
Designed by our team and NASA Dryden, the first successful flight test of an aircraft completely under the control of an electronic digital fly-by-wire control system was accomplished.
1973
We officially became an independent, not-for-profit corporation. The corporation was introduced as The Charles Stark Draper Laboratory, Inc.
Skylab started two years of space experiments. This included three manned flights to Skylab employing Apollo Command Modules. We developed the algorithms used for Skylab’s guidance and control package.
1979

The U.S. Navy deployed the Trident I (C4) Fleet Ballistic Missile, which was equipped with the Draper-designed MK5 guidance system aboard submarines.
1981

The first launch of a NASA Space Shuttle featured a guidance, navigation, and control system designed by our team, alongside a backup flight system. We later upgraded the system for specific mission needs (e.g., Hubble Space Telescope Servicing Mission in 1993).
1983
The maiden test flight of the U.S. Air Force MX Missile later designated Peacekeeper, featured a Draper-designed Advanced Inertial Reference Sphere serving as the inertial measurement unit within the guidance system.
1984
The first kinetic kill intercept of a simulated ICBM reentry vehicle in the exoatmosphere occurred. Throughout the program, we provided independent analysis to the government and led a review committee for the Homing Overlay Experiment program leading up to the test flight.
1986
Serving as a key member of the Delta-180 team, we analyzed navigation, sensor filtering, guidance design, and software that enabled the demonstration of the first kinetic energy intercept of a ballistic missile during its boost phase.
1987
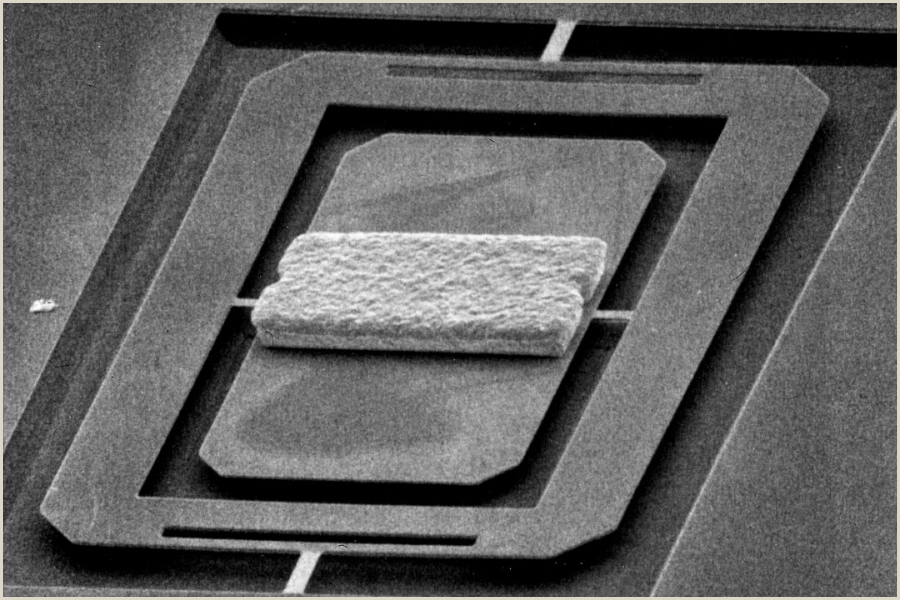
We were the first to scale angular rate with a silicon Microelectromechanical System (MEMS) double-gimbal gyro, a MEMS Foucault gyroscope.
1988
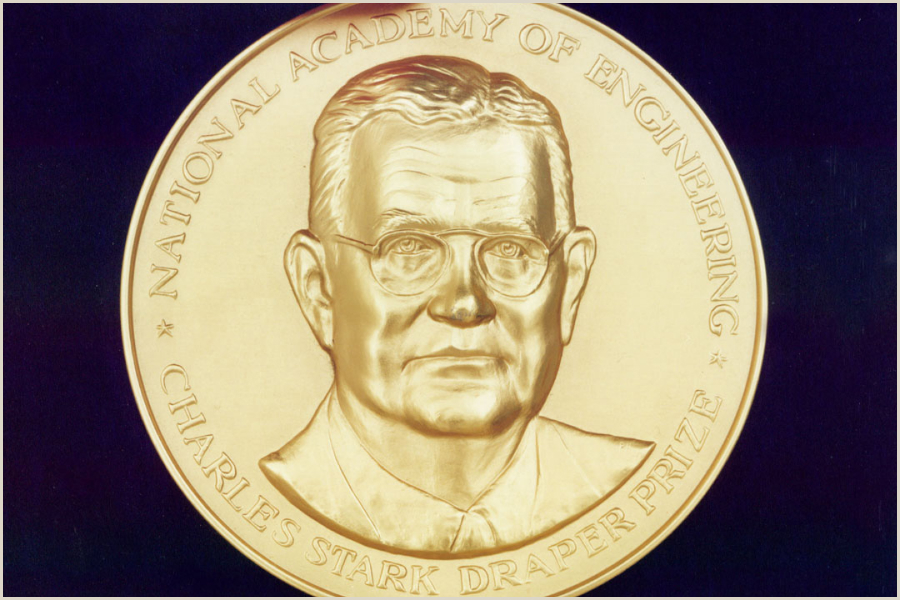
The Charles Stark Draper Prize was created in memory of our founder by the National Academy of Engineering to increase public awareness of the contributions of engineering to society’s prosperity.
1990

One out of two Unmanned Undersea Vehicles began at-sea testing for DARPA. These autonomous testbeds were designed around our fault-tolerant processor and vehicle control architecture and were used to test mission packages.
The U.S. Navy Trident II (D5) Fleet Ballistic Missile was deployed with the Draper-designed MK6 guidance system. The MK6 had been flight-tested successfully aboard a Trident II missile in 1987.
1992
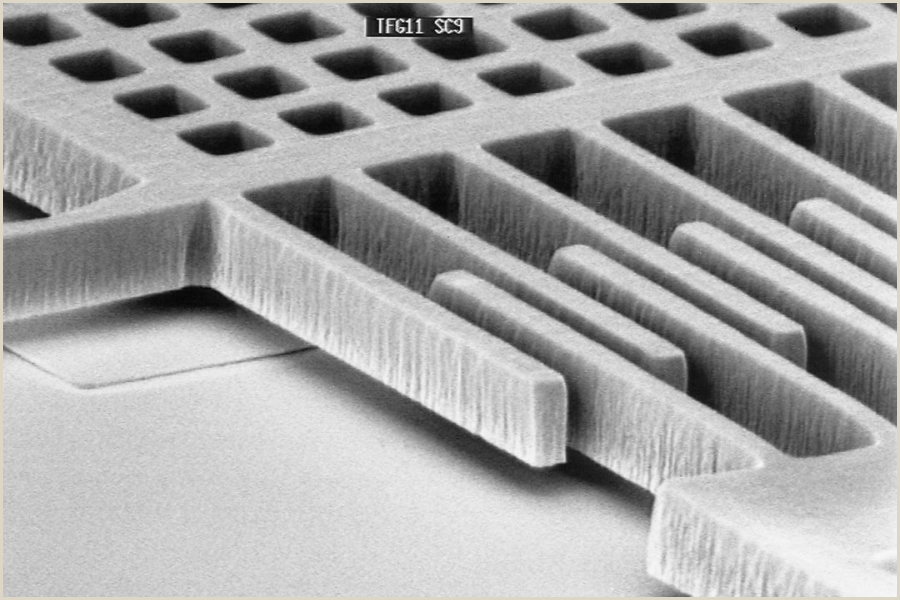
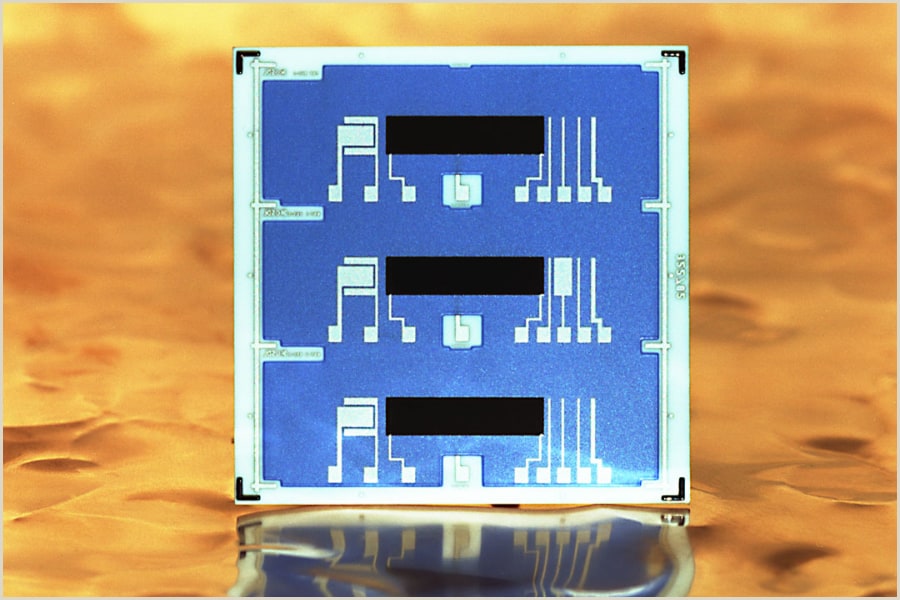
We demonstrated the first micromachined silicon tuning-fork gyroscope. This created a noise of 500 degrees/hour per square root Hertz, which advanced research that led to military and commercial applications.
1993

The navigation system for the USS Dolphin, a deep-diving U.S. Navy research and development submarine, was delivered. We later upgraded the system.
1994
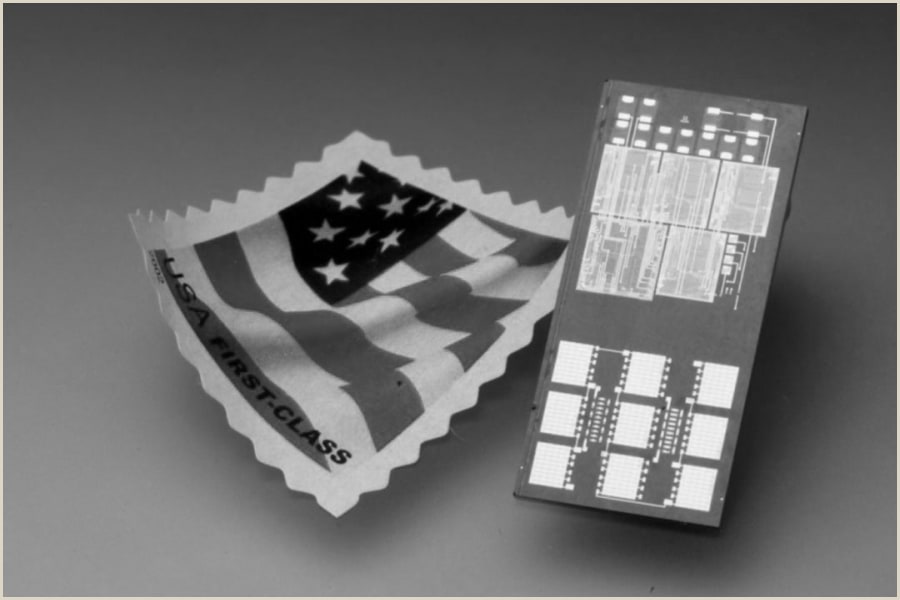
Multichip Modules (MCMs) were first delivered. We initiated work on MCMs in 1987, interested in the technology’s ability to miniaturize systems through compacted packaging of integrated circuits.
1995
The WM Keck Foundation was awarded $4.5M to fund a three-year collaboration between us, MIT, and Mass. The Eye & Ear Infirmary established the Keck Neural Prosthesis Research Center, which became a baseline for our future biomedical engineering activity.
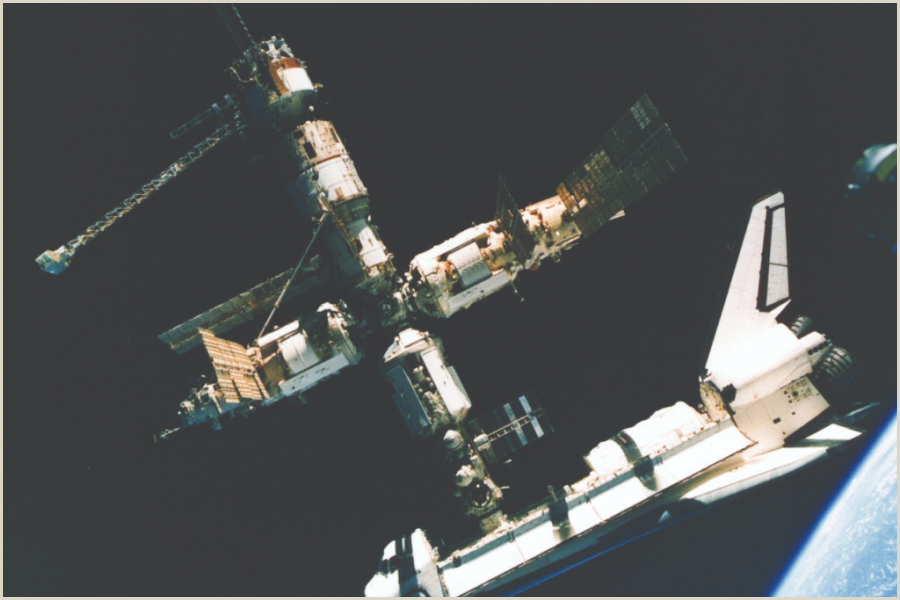
Due to the successful work in 1994 to redesign the Shuttle’s on-orbit flight control system for a mission, the first docking of the Space Shuttle and the Russian Space Station Mir occurred on June 29, 1995.
1996

The first all-silicon sensor-based inertial measurement unit was launched on the Extended-Range Guided Munitions Demonstration Program.
The newly developed autonomous guidance, navigation, and control capability for parafoils was demonstrated by the Precision Guided Airdrop System (PGAS) program. PGAS allowed for navigation via an onboard combination of an inertial navigation system and GPS.
1997

The U.S. Navy began sea trials on SSN21 Seawolf using the first “fly-by-wire” fault-tolerant submarine control system. We developed and built fault-tolerant ship control computers and I/O units. We also developed the software for the operating system and redundancy management.
Our team delivered the tactical hardware and software for the Integrated Control and Display System for the Advanced SEAL Delivery System to the U.S. Navy.
1998
The initial prototype of the micromachined Differential Mobility Spectrometry (DMS) system underwent fabrication and testing, which led to miniaturizing DMS technology. The effort was achieved in collaboration with New Mexico State University.
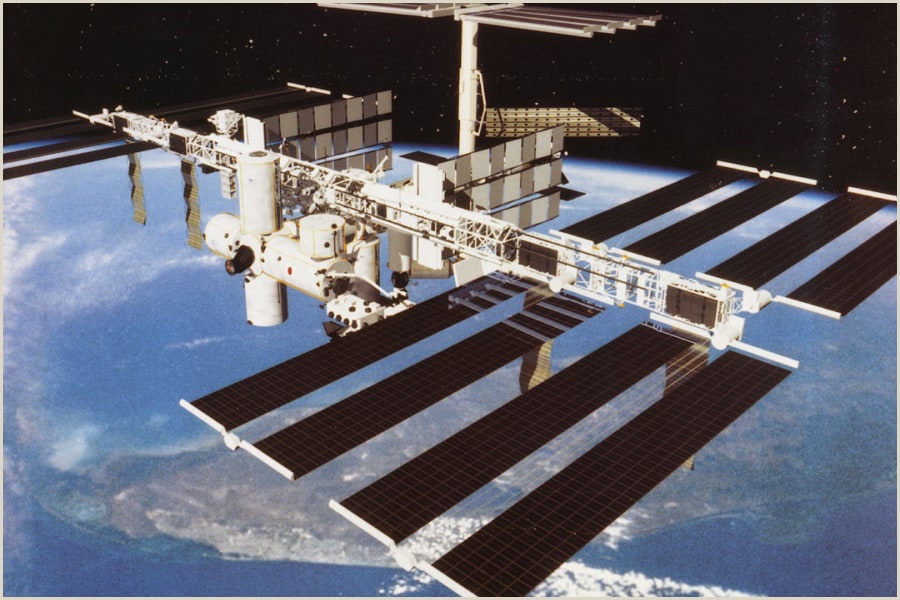
We upgraded to the on-orbit flight control system developed for the Space Shuttle. This was utilized for the first International Space Station assembly flight. These upgrades provided enhanced stability, improved control, and streamlined operational simplifications.
2001
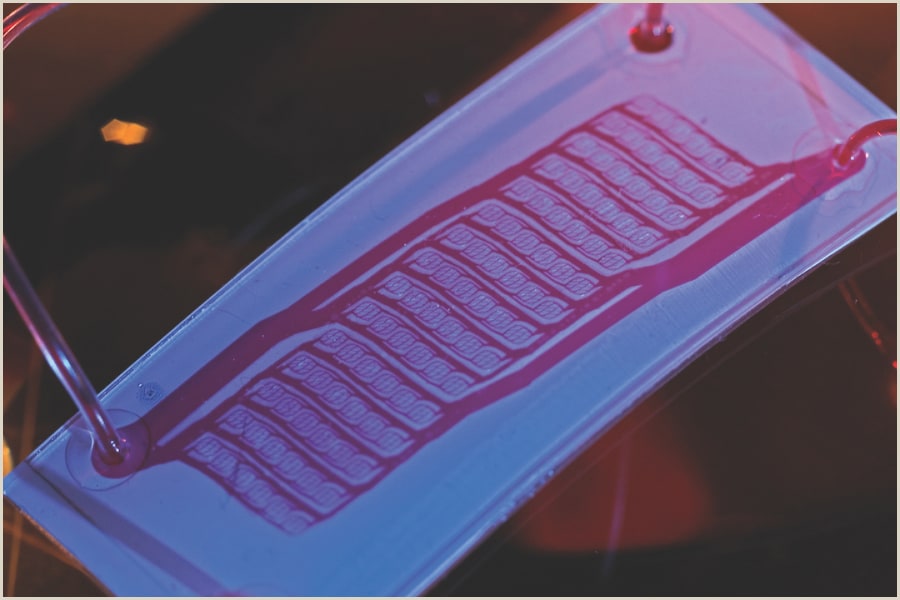
Our work for the first artificial blood vessel network using MEMS technology was reported at the MicroTAS 2001 Conference.
2003
We started an extended role as both the programs and systems integrator for the entire U.S. Navy Trident II (D5) Missile Guidance Program. This led to the development of the MK6 MOD 1 Guidance System Life Extension Program, the first strategic missile guidance system employing solid-state gyros.
2004
We designed software that enabled a collection of intelligence, surveillance and reconnaissance data via an unmanned undersea vehicle, which was demonstrated in ONR’s Maritime Reconnaissance Demonstration program.
2005
MCM technology completed its transition from a laboratory technique to an economically viable production process. The success behind this advance was the application of machine vision to laser-drilled via-hole alignment and the integration of known-good-die testing after thinning.
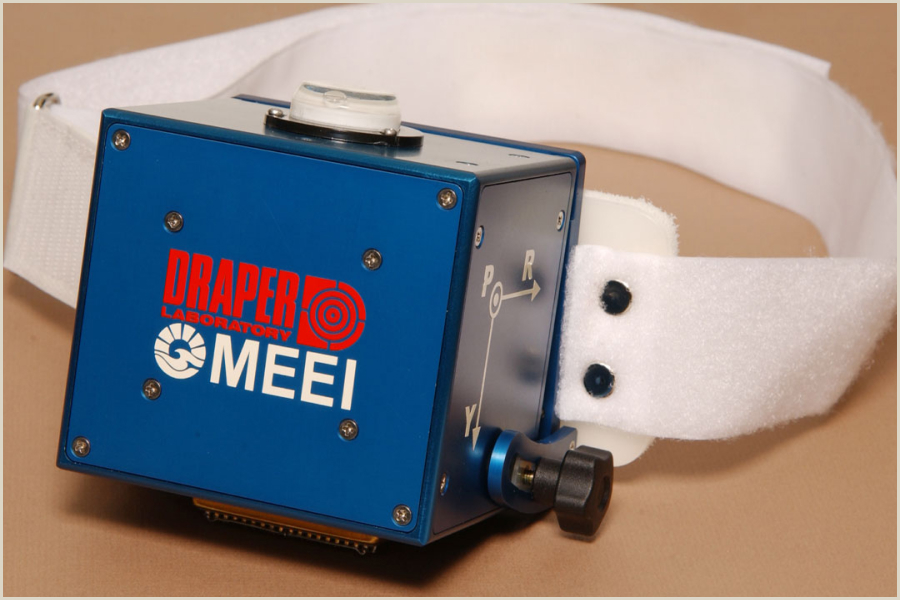
A belt-mounted Personal Navigation System showed the ability to determine location without the use of GPS and by only using a MEMS inertial measurement unit and a miniature Doppler velocity sensor.
2006
We secured our first grant as principal investigators from the National Institutes of Health, collaborating on the Bioengineering Research Partnership for Intracochlear Drug Delivery with the Massachusetts Eye and Ear Infirmary.
The integrated Ultrahigh Density (iUHD) platform concept was introduced. This packaging process exploits commercial semiconductor process equipment to create 3D stacked systems that are customizable and compatible with multiple materials and substrates.
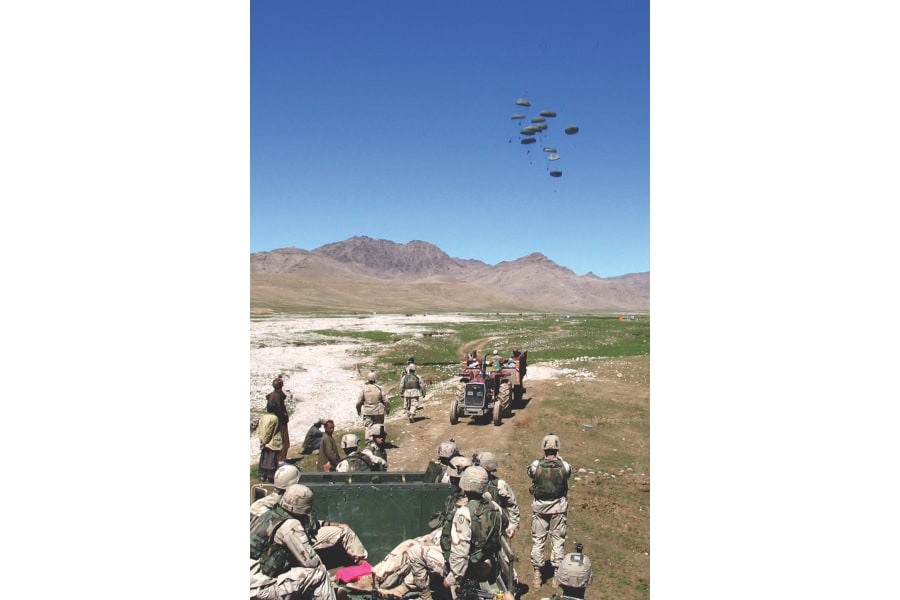
The Joint Precision Airdrop Mission Planner was quickly deployed in Afghanistan, operating on laptops onboard Air Force cargo planes. The mission planning software efficiently determined optimal release points for dropping cargo, employing unguided parachutes and guided airdrop systems to ensure precision landing.
We successfully showcased Zero Propellant Maneuver capability in orbit, designed to conduct large-angle maneuvers of the International Space Station without the use of its thrusters. This cut down on the number of fuel resupply missions.
The Inertial Stellar Compass achieved full operational status aboard the TacSat-2 spacecraft, marking the inaugural utilization of a MEMS gyro in space within a stellar package designed for spacecraft attitude determination.
2009
To monitor volatile organic compound levels in cabin air, microAnalyzers equipped with Differential Mobility Spectrometry and programmable compact gas chromatography were installed onboard the International Space Station. Enhanced microAnalyzers were subsequently integrated into the ISS operations in 2013.
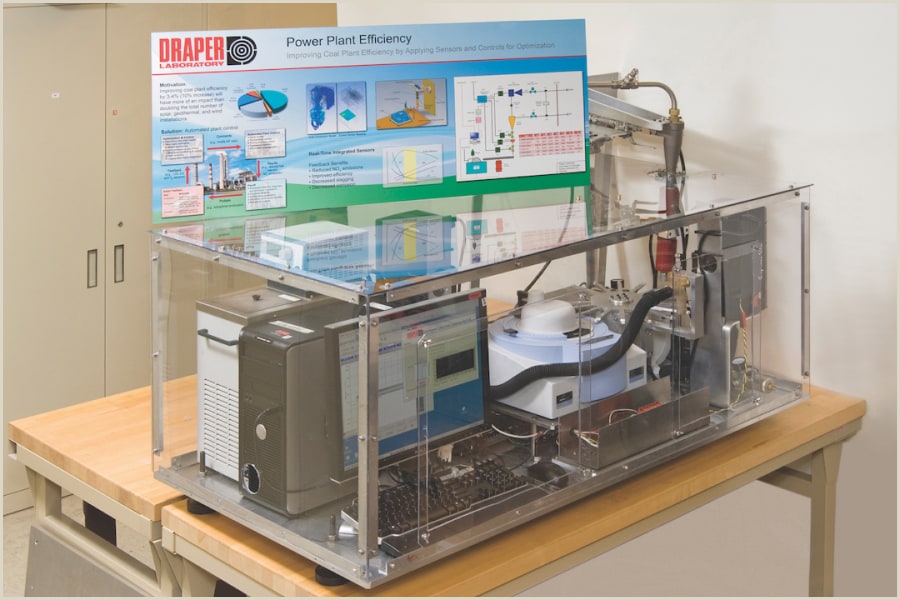
We embarked on our externally funded energy project, sponsored by Progress Energy, aimed at developing a prototype automated system to measure combustion efficiency in coal power plants.
2010

As part of the International Space Station Team, we were honored with the prestigious Collier Prize, sharing the achievement with NASA and other industry partners.
The initial delivery of iUHD modules took place, marking a milestone in the advancement of technology.
We were inducted into the Space Technology Hall of Fame for our groundbreaking work on aircraft digital fly-by-wire flight control technology, developed in collaboration with the NASA Dryden Flight Research Center.
2011
We created fault-tolerant computer design and control software along with guidance, navigation and targeting software for Commercial Cargo Demonstration for the International Space Station.
Our guided parafoil guidance, navigation, and control software were used in Afghanistan as part of the Joint Precision Airdrop System. Our flight software is now distributed and used as government-furnished equipment for new precision-guided airdrop systems of all weight classes.
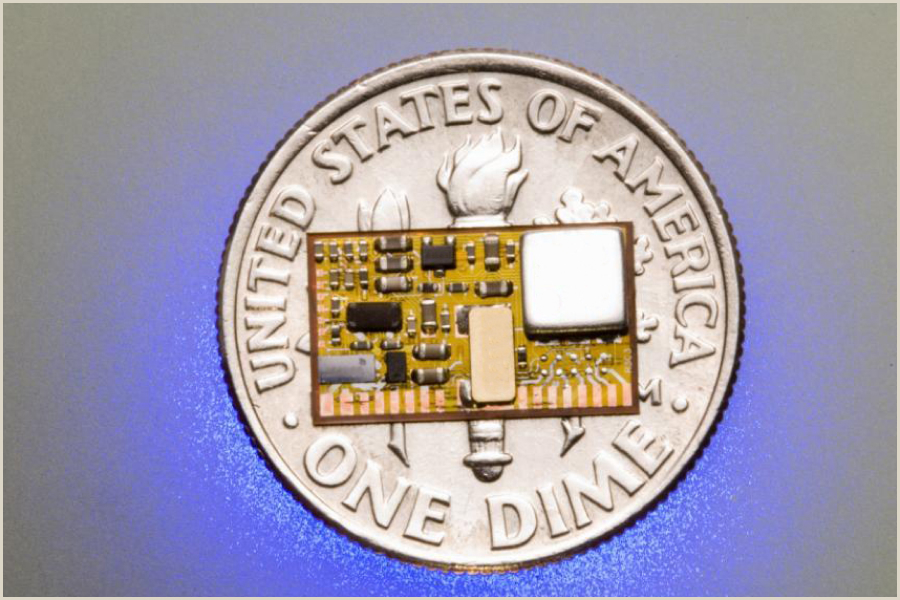
Based on a project for the Defense Advanced Research Projects Agency (DARPA) that designed the world’s smallest and lowest-power atomic clock, a commercial version of the chip-scale atomic clock was released on the market. Our team created the physics package.
2012
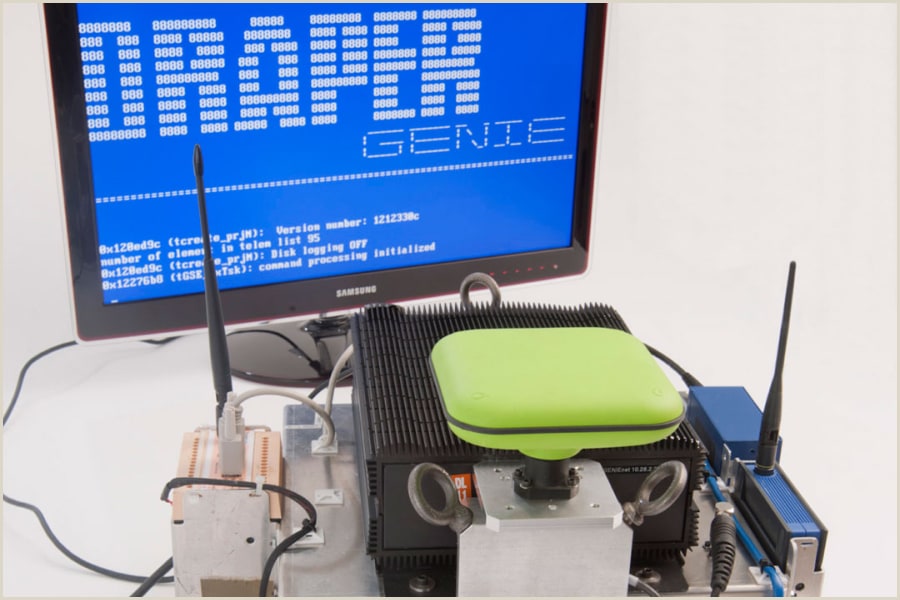
The free flight of the Draper-developed Guidance Embedded Navigator Integration Environment (GENIE) was conducted aboard the Terrestrial Test Rocket. This versatile testbed facilitates terrestrial evaluation of space payloads.
A milestone was achieved with the first flight of the MK6 MOD 1 guidance system for the Navy’s Trident missile. This effort involved the replacement of all sensors and electronics, alongside a system re-architecture.
2013

Cygnus flew autonomously to the ISS and successfully executed rendezvous and berthing for the first time. Our team played a vital role in the development of Cygnus's guidance, navigation and targeting algorithms, as well as its flight software. Additionally, our Fault-tolerant Flight Computer Network Element and software were used, contributing to the success of cargo resupply service missions to the ISS commencing in 2014.
2014
Designed for use when GPS is not available, our advanced celestial navigation technology was demonstrated on a NASA DC-8 aircraft. It was demonstrated at sea for the first time aboard a ship in 2018.
2015
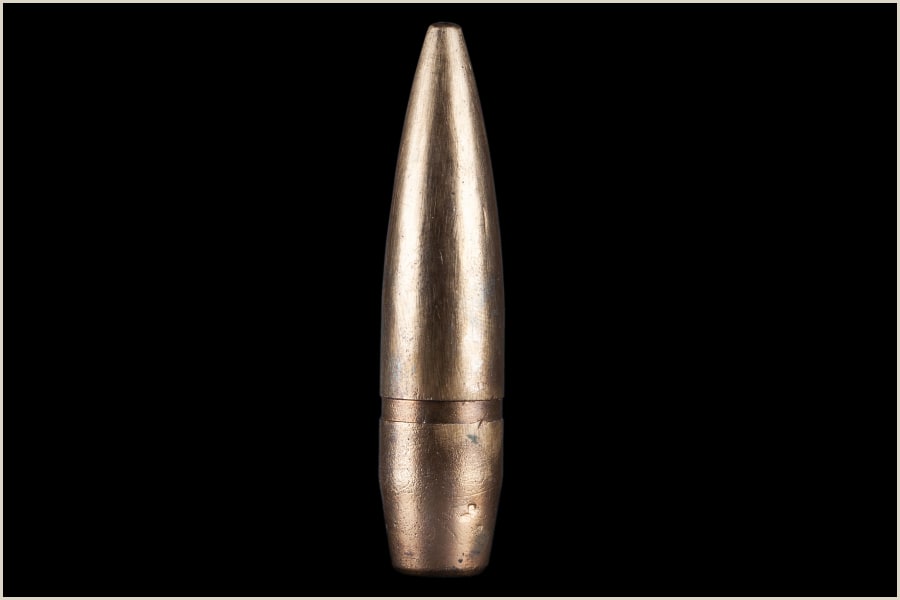
A successful live-fire test demonstrated a self-guided 50-caliber bullet. We wrote the guidance-and-control software for the bullet and for the optical sighting system for use during both day and night.
2016

Deployment began of the Draper-designed MARK 6 MOD 1 guidance system for the Trident II (D5) missile to the U.S. Navy submarine fleet. We are the prime contractor for design, development, production, and deployed system support for this guidance system.
2017
During DoD Conventional Prompt Strike (CPS) Flight Experiment-1, a hypersonic glide body equipped with our avionics and flight software achieved highly precise navigation to its target during the first flight test. This achievement marks the first demonstration of an accurate hypersonic long-range precision-strike capability.
2019
The Orion Ascent Abort-2 (AA2) flight test of the Launch Abort System was successful. We were part of the team that designed, integrated, verified, and operated the AA2 guidance, navigation, and control system as part of NASA’s Artemis program.
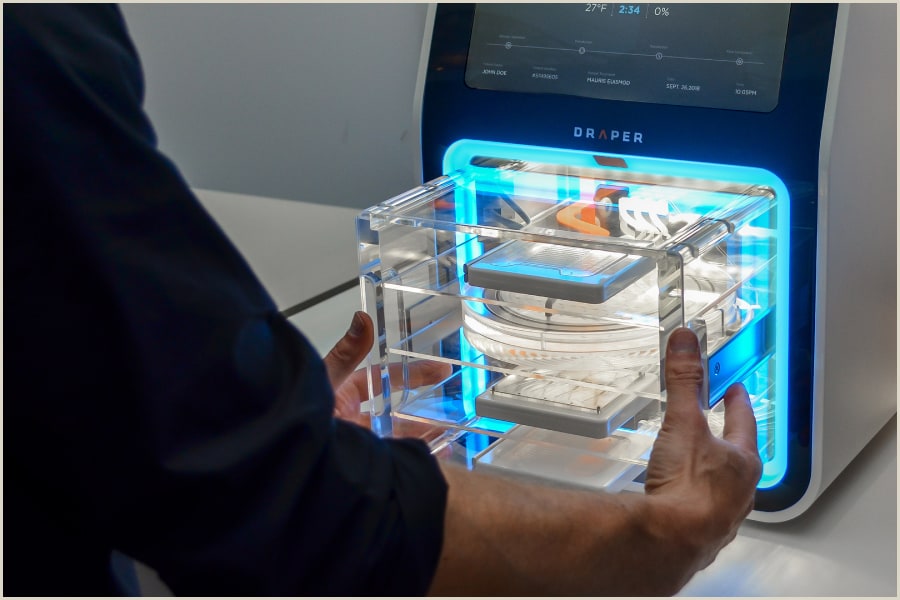
Utilizing microphysiological systems technology developed through collaboration between our team and Pfizer Inc., joint teams from both companies created vascular, liver, and colon/ileum organ model systems over three years, culminating in their delivery in 2019. These advancements aim to enhance preclinical drug safety and efficacy testing.
We successfully demonstrated a proof-of-concept LiDAR with its hybrid integrated photonics and MEMS technology after three years of contracting to develop its photonic beam-steering technology for automotive applications.
2020
Enhanced CPU (ECPU) modules, designed and delivered by our team, were integrated into service on U.S. Navy submarines. These modules effectively double the fault-tolerant computing capacity, supporting mission capability and software functions.
2021
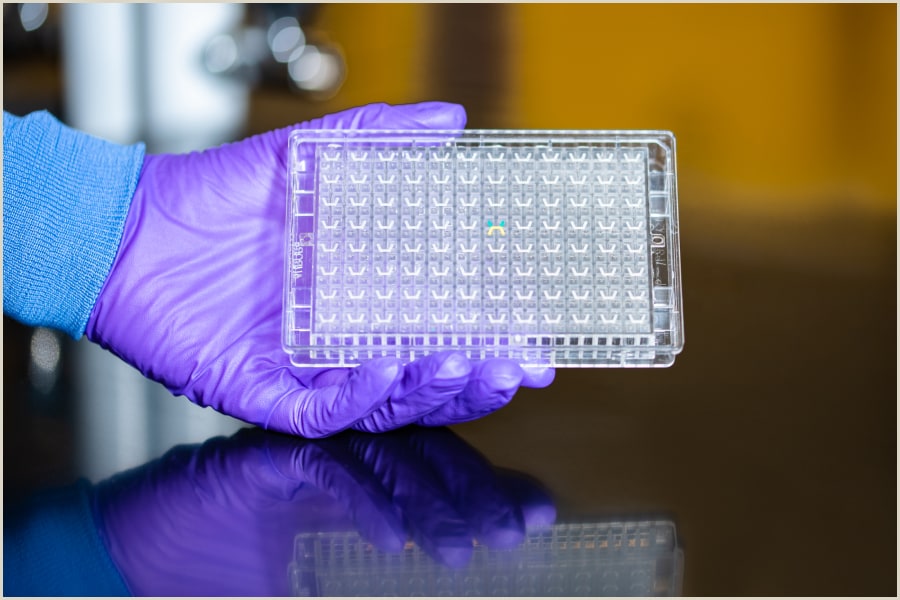
We demonstrated the initial infection and viral replication of SARS-CoV-2 utilizing a wild-type virus in a human tissue lung-on-a-chip model. These experiments were conducted using our innovative PREDICT96-ALI (airway-liquid interface) platform and organ model.
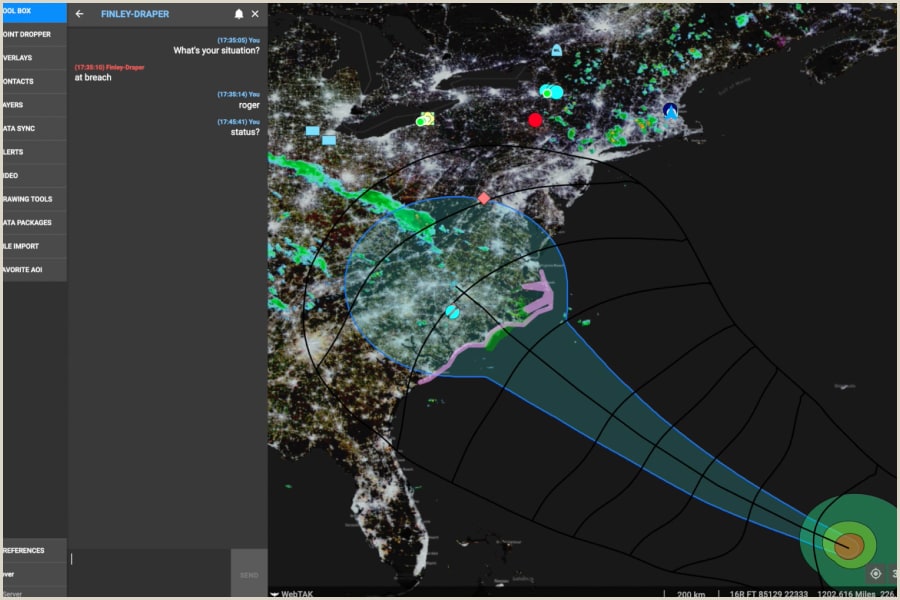
Our WebTAK system delivered web-based situational awareness support for the Defense Threat Reduction Agency during the presidential inauguration. WebTAK is an integral component of the Tactical Assault Kit (TAK) ecosystem, which includes ATAK and WinTAK. As a member of the original ATAK development team, we played a pivotal role in the initial design and development of core software.
2022
Our team provided Therapeutics (a Gilead company) with preclinical units of three bioprocessing modules – acoustic separation, electroporation, and viral transduction. These modules are intended to enhance Kite's CAR-T manufacturing process.
Draper NXT: Unlimited Possibilities
To create an even greater impact and enhance the nation's well-being, we have initiated a 10-year journey. We aim to expand our workforce, empowering them to welcome more challenges to our customers' success. We will improve our infrastructure, providing enhanced support for our innovators and fostering efficiency in all fields from space exploration to medical diagnostics.
We will continue to focus on educating the next generation of innovators through our Draper Scholars Program, to uphold our commitment to technological advancement. This initiative offers hands-on research and development opportunities to numerous graduate and undergraduate students, fueling our mission to succeed.
Learn More About Future Missions and Innovations